The Ultimate Guide: Architecting Edge Computing for Zero-Latency Control in Critical Water Infrastructure Automation
Discover how to architect edge computing for zero-latency control in critical water infrastructure Automation, ensuring resilient, real-time operational continuity. This deep-dive technical case study provides actionable strategies for water Infrastructure Managers to deploy distributed edge nodes securely and efficiently.
- The Critical Need for Zero-Latency in water Automation
- Case Study: Mitigating water Hammer via Edge-Driven Autonomous Control
- The Challenge
- The Edge Architecture Solution
- Technical Benchmarking: Cloud SCADA vs. Edge Control
- Practical Implementation: Zero-Latency Control Logic
- Code Breakdown for Automation Engineers
- Securing the Edge Infrastructure
- Conclusion
The Critical Need for Zero-Latency in water Automation
In modern water and wastewater management, the shift toward centralized cloud SCADA systems has brought unprecedented visibility and analytical power. However, for Field Automation Engineers and water Infrastructure Managers, this centralization introduces a critical vulnerability: latency. When managing high-pressure pumping stations, chemical dosing systems, or rapid-response pressure reducing valves (PRVs), relying on a cloud round-trip for control logic is a recipe for disaster. A 200-millisecond delay in valve actuation can result in severe transient pressure waves—commonly known as water hammer—leading to catastrophic pipe bursts and infrastructure degradation.
To mitigate these risks, the industry is rapidly adopting edge computing. By pushing computational power and control logic directly to the network’s periphery (the pumping station or reservoir), utilities achieve zero-latency control, autonomous operation during network outages, and high-fidelity data processing. This approach is highly complementary to advanced analytics, such as architecting edge AI for municipal water leak detection, where local processing of high-frequency acoustic data is mandatory.
Case Study: Mitigating water Hammer via Edge-Driven Autonomous Control
The Challenge
A regional municipal water utility operating a distributed network of 45 high-head pumping stations was experiencing repeated mechanical failures. Their legacy architecture relied on a centralized SCADA system communicating over cellular LTE. During grid fluctuations or cellular network congestion, the polling rate dropped from 1 second to over 5 seconds. If a downstream blockage occurred during these latency spikes, the central PLC could not command the variable frequency drives (VFDs) to ramp down in time, causing pressure spikes exceeding 250 PSI.
The Edge Architecture Solution
As the lead Field Automation Engineer, the objective was to decouple critical safety logic from the telemetry network. We architected a distributed edge computing model using hardened Industrial PCs (IPCs) running a lightweight Kubernetes distribution (K3s). These edge nodes sit parallel to the local PLCs, interfacing directly via Modbus TCP at millisecond polling rates.
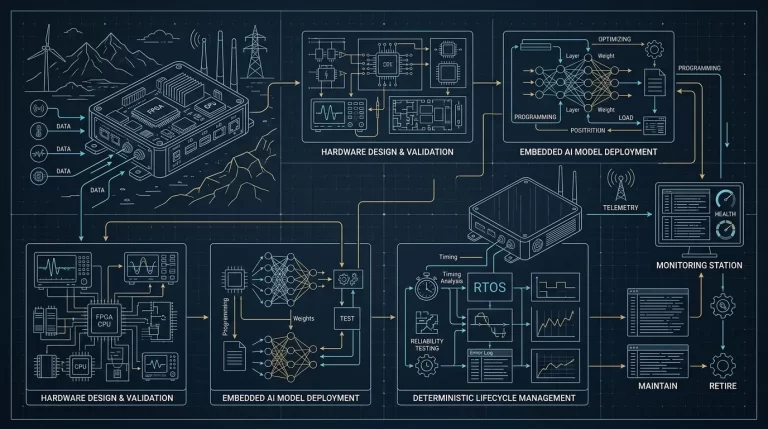
The architecture was structured into three distinct layers:
- The Physical Layer: Local PLCs, pressure transducers (4-20mA), and VFDs operating the pumps.
- The Edge Compute Layer: Hardened IPCs executing localized Python-based control loops and containerized AI models. This layer acts as an autonomous safety net.
- The Cloud/SCADA Layer: The centralized system receiving asynchronous MQTT telemetry for historical trending, reporting, and non-critical setpoint adjustments.
Technical Benchmarking: Cloud SCADA vs. Edge Control
To justify the capital expenditure of deploying edge nodes across 45 sites, we conducted a rigorous performance benchmark. The following table illustrates the stark contrast between traditional cloud-dependent control and localized edge computing for critical water infrastructure.
| Performance Metric | Traditional Cloud/Central SCADA | Distributed Edge Computing |
|---|---|---|
| Control Latency | 150ms – 5000ms (Network Dependent) | < 10ms (Deterministic) |
| Offline Autonomy | Failsafe mode only (Pumps shut down) | Full autonomous operation and logic execution |
| Bandwidth Consumption | High (Continuous polling of all registers) | Low (Report-by-exception via MQTT) |
| Data Granularity | 1 Hz (1 sample per second) | 100 Hz (100 samples per second locally) |
| Security Posture | Vulnerable to Man-in-the-Middle on WAN | Isolated critical logic (Air-gapped safety layer) |
Practical Implementation: Zero-Latency Control Logic
The core of this architecture relies on edge scripts that bypass the slow telemetry loop. Below is a practical, expert-level Python implementation running on the edge IPC. This script utilizes pymodbus to poll the local PLC at 100Hz (every 10ms). If a critical pressure threshold is breached, it executes an immediate local override to close the valve, while asynchronously publishing an alert to the central SCADA via MQTT.
import time
from pymodbus.client import ModbusTcpClient
import paho.mqtt.client as mqtt
import threading
# Edge Node Local Configuration
LOCAL_PLC_IP = '192.168.10.50'
PRESSURE_REGISTER = 40001
VALVE_REGISTER = 40005
CRITICAL_PRESSURE_PSI = 150.0
# Initialize Local Modbus Connection
modbus_client = ModbusTcpClient(LOCAL_PLC_IP)
def publish_alert_to_cloud(pressure):
"""Asynchronous cloud notification (does not block local control)"""
try:
mqtt_client = mqtt.Client()
mqtt_client.connect("cloud-scada.utility.net", 1883, 60)
payload = f'{{"alarm": "HIGH_PRESSURE_TRIP", "value": {pressure}, "timestamp": "{time.time()}"}}'
mqtt_client.publish("water/alarms/critical", payload)
mqtt_client.disconnect()
except Exception as e:
print(f"Cloud telemetry failed, but local control remains active: {e}")
def edge_control_loop():
"""High-frequency local polling loop for zero-latency control"""
modbus_client.connect()
print("Edge Control Node Active: Monitoring Pressure at 100Hz")
while True:
try:
# Poll pressure sensor locally at 10ms intervals
result = modbus_client.read_holding_registers(PRESSURE_REGISTER, 1)
if result.isError():
continue
current_pressure = result.registers[0] / 10.0
if current_pressure > CRITICAL_PRESSURE_PSI:
# Immediate local override - Zero Latency Trip
modbus_client.write_register(VALVE_REGISTER, 0) # 0 = EMERGENCY CLOSE
print(f"CRITICAL OVERRIDE: Pressure {current_pressure} PSI. Valve Closed.")
# Offload cloud reporting to a separate thread to maintain local loop speed
threading.Thread(target=publish_alert_to_cloud, args=(current_pressure,)).start()
# Prevent rapid toggling (debounce)
time.sleep(5)
time.sleep(0.01) # 10ms loop
except Exception as e:
print(f"Local Modbus Exception: {e}")
time.sleep(1)
if __name__ == "__main__":
edge_control_loop()
Code Breakdown for Automation Engineers
This script highlights the true power of edge computing in industrial Automation:
- High-Frequency Polling: The
time.sleep(0.01)ensures the edge node evaluates system pressure 100 times per second. This granularity is impossible over standard cellular telemetry. - Decoupled Telemetry: The
publish_alert_to_cloudfunction is dispatched via a separate thread. If the cellular connection tocloud-scada.utility.netdrops, the local Modbus loop continues executing flawlessly, ensuring the valve still closes during a pressure spike. - Deterministic Execution: By keeping the control loop localized to the 192.168.10.x subnet, network jitter is virtually eliminated.
Securing the Edge Infrastructure
Deploying compute nodes at remote pumping stations dramatically expands the threat landscape. A robust edge architecture must incorporate strict IT/OT segmentation based on the ISA/IEC 62443 standard. The edge IPC must sit in a demilitarized zone (DMZ) between the local OT network (PLCs, VFDs) and the external WAN.
For water Infrastructure Managers, this means implementing strict firewall rules where the edge node can only initiate outbound MQTT connections to the cloud broker, blocking all inbound traffic from the internet. Furthermore, deploying certificate-based authentication for the MQTT payloads ensures that rogue actors cannot inject false telemetry. For a deeper dive into securing these remote nodes, I highly recommend reviewing practical strategies for architecting zero-trust security for legacy water SCADA networks.
Conclusion
Architecting edge computing for zero-latency control is no longer a futuristic concept; it is an operational necessity for critical water infrastructure. By decoupling safety-critical Automation logic from high-latency cloud networks, utilities can drastically reduce mechanical wear, eliminate water hammer events, and ensure continuous operation during telecommunications outages. For water Infrastructure Managers and Field Automation Engineers, the transition from centralized polling to distributed, edge-driven autonomous control represents the ultimate step toward resilient, next-generation water management.